UPGRADE IN PROCESS... CHECK BACK LATER
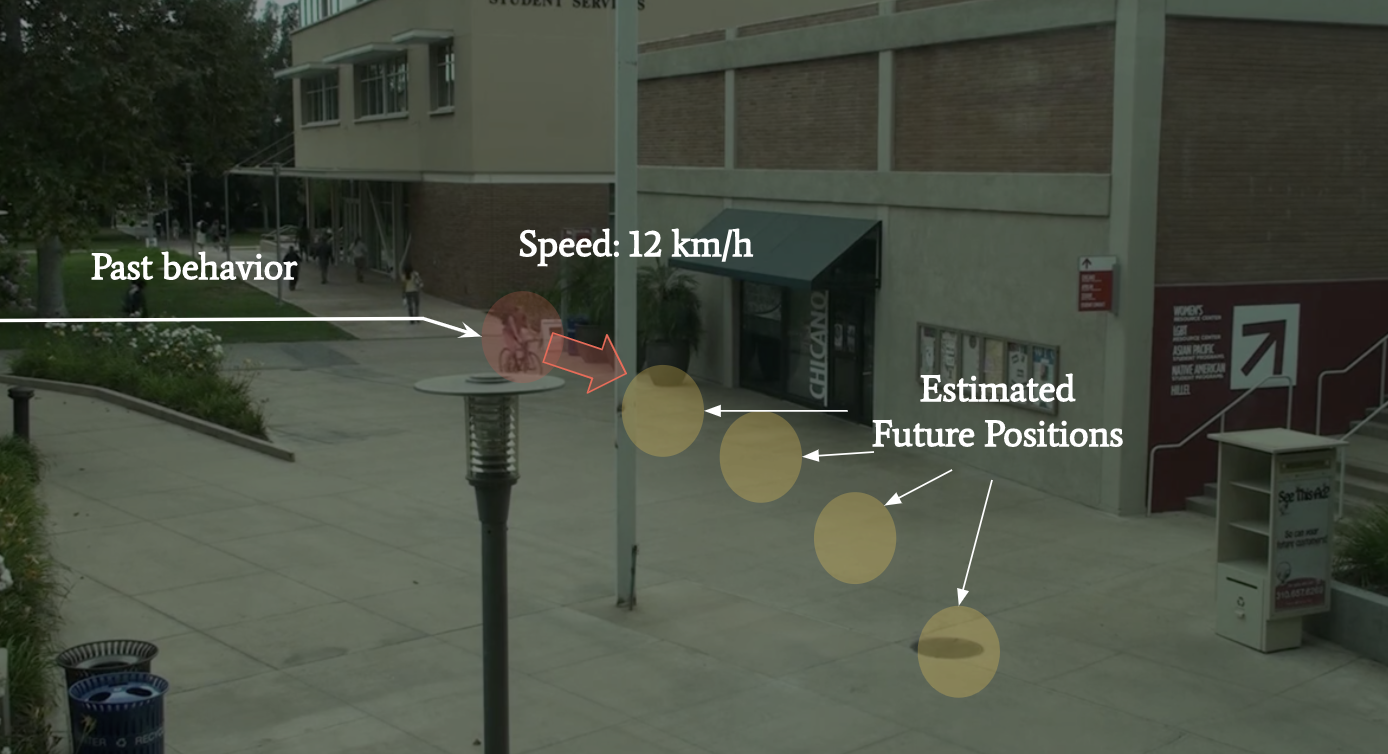
Learn the #1 Most Important Skill in Robotics, State Estimation, Sensor Fusion, and Tracking.
--
This course is currently being UPGRADED to feature advanced Sensor Fusion, Localization, and Perception skills. Expect a re-opening later this year. In the meantime, visit all our other courses.

Introducing...
MODULE 1
What you'll learn:
MODULE 2
What you'll learn:
MODULE 3
What you'll learn:

"Kalman Filters are something I've wanted to learn for a long time as these are not usually taught on AI courses, but more with Robotics.
At the start the maths looked terrifying but by the start of the assignment Jeremy had broken it down into a very understandable and non-terrifying mass of letters and numbers that suddenly made sense.
I now look forward to improving my computer vision models with Kalman Filters and seeing how far I can take them."
"It helped me connect many dots together related to probabilistic robotics.
This coursework is really amazing and it has given me some insights about those topics I was really not aware at at the beginning."
"This is a great course and it is exactly what I was looking for! To be honest I played with the code quite a few hours and could develop a really good understanding how a Kalman filter works. Thanks a lot and I hope you'll come up with another course on Particle Filters."
Mathias Mantelli, Software Developer in Robotics
The Kalman Filter course starts from the basic probabilistic concepts and it goes until a practical example applying the taught algorithms.
You're going to learn everything that you need. Besides, Jeremy is very thoughtful to the ones who are taking the course and replies to every comment you make."
UPGRADE IN PROGRESS...
This course is being upgraded to feature more Perception, Sensor Fusion, and Localization techniques. Check back later.