Get to the leading edge of LiDAR research and take your first steps in 3D Deep Learning.
This course is now closed and will open on February 5, 2026. Make sure to join the waitlist to get notified and receive the set of x3 LiDAR Deep Learning goodies while you wait.
Dear friend, if you want to learn some of the most advanced, adventurous, and career profitable skill in the entire field of autonomous tech, then this page will show you how.
Here's the story:
Earlier this year, I was browsing Computer Vision Engineer Job offers to help a client understand why he couldn't land a job in self-driving cars. Although he had learned traditional Computer Vision, Image Segmentation, Object Detection, Kalman Filters, and even started to play with 3D Computer Vision... it seemed like the job offers he wanted rejected him.
Of course, he HAD the job interviews when the job was for industries like retail, or when it was jobs in big consulting firms... he had one opportunity in AR/VR; but every time it was a job in autonomous robots, he was told they were looking for a different profile.
One day, he had enough and reached out to me, described the situation, shared some links to his resume, and job offers, and asked:
"What am I doing wrong?!"
I started to look as his resume, portfolio, projects, but nothing obvious stood out. He indeed had an interesting profile.
Even though his target jobs were for "Computer Vision Engineer", it was surely NOT the type of Computer Vision Engineers companies were looking for...
The offers are now expired, but I found very similar offers to those he applied to, and I'd like you to pay attention to the first bullets I highlighted:
This is NOT an outlier. This is widespread.
A majority of the self-driving car industry is using LiDARs and Deep Learning... and with the arrival of Transformers, it's now more common than ever to use Deep Learning with both images and point clouds.
This is a MAJOR SHIFT that took me months to realize: in many jobs, Computer Vision Engineers can no longer stick to images only.
Back when I joined the self-driving car world, my role was "Computer Vision", and all I knew was cameras. My colleagues were LiDAR Engineers, Kalman Filter Engineers, RADAR Engineers, and had ZERO IDEA of how Computer Vision worked... I was even shocked that they would not know any Deep Learning... and yes, in lots of companies, this total separation of jobs still makes sense...
Back in 2020 or so, I remember Oliver Cameron, at the time CEO of the autonomous driving startup Voyage, saying:
"The entire self-driving car industry is now using Deep Learning to process point clouds".
I don't know how close he was to reality back then, but today, I'd say he is pretty close...
So if you're learning Point Clouds, but solely via Machine Learning...
Or Sensor Fusion, but solely with traditional approaches...
Or Computer Vision, but solely on images...
You have to realize that:
Your new skills must work on LiDARs AND Cameras.
Your new skills could be 3D Classification, 3D Segmentation, 3D Object Detection, and more...
Because these skills are so important, we started building a course, that had one objective, help engineers understand
It was supposed to be an easy answer, but it wasn't. In fact, there was multiple ways to do it, some valid, some outdated, some completely custom... It was a complete chaos.
The first version helped understand the simplest possible way to build a Point Cloud classifier... and then the course received updates, got more advanced, included volumetric techniques, sparse convolutions, 3D segmentation, 3D Object Detection, and doing way more than just answering this one question...
It became a ROADMAP to master the 3D Deep Learning world!
This became an instant hit, signed as the most popular course on the entire catalogue... it got taken by engineers from all companies like Mercedes-Benz, Daimler, Continental, and hundreds of other companies...
What started as a simple idea, became...
MODULE 1
In the first module, you'll get an understanding of the different ways to build 3D Classifiers, and build your first algorithm from scratch to do 3D Classification and Segmentation.
What you'll learn:
3 Reasons why you can't use Convolutions with Point Clouds, and the only type of Convolution that can be used to learn features directly on Point Clouds
The Self-Driving Car Engineer's most common ways to process point clouds with Deep Learning (at least one involves converting the point cloud into a voxel representation; we'll learn all about it)
An in-depth overview of the 3D Deep Learning world, from meshes and video games to point clouds
The difference between euclidean and non euclidean 3D Data, and why it changes the entire algorithm you need to use
My Top 8 Libraries to work with 3D Data, including for tasks like 3D Classification, 3D Object Detection & Segmentation, but also 3D Reconstruction, Structure from Motion, and Augmented Reality.
A quicky way to load and visualize any point cloud on your desktop (and what you need to do if your point cloud is in Binary format)
A Deep Dive into the PointNet Algorithm, a pioneer in 3D Deep Learning, often considered most important algorithm in 3D Deep Learning
Now, when I say this, I mean it.
You are going to understand this algorithm top to bottom, because it's a foundation of the 3D Deep Learning world:
In this context, we'll also learn:
The loss function of a point cloud classification network, and how to adapt it for another task
The 3 Rules when Processing Point Clouds with Deep Learning (one of them involves invariance — a point cloud is random, and the order of points can be changed, unlike pixels)
The real reason PointNet isn’t good enough for large point clouds data, and how PointNet++ solves it
An Intro to Spatial Transformer Networks — A key algorithm in Point Cloud processing and canonical learning
How to tweak a 3D Network for 3D Semantic Segmentation with Deep Learning (and why most voxel based approaches can’t do it)
(BONUS) The PyTorch Cookbook — A 16 Page PDF showing you how to handle PyTorch in 5 minutes
Spatial Encoding: How to design a 3D Deep Learning algorithm to learn a specific shape; and how to tell the difference between two similar shapes
How self-driving cars manage to find and classify objects, even though they only see a few part of it (often, the point clouds are one part of a car, never the entire 3D model)
PROJECT 🔥: How to implement, train, and run a point cloud classification algorithm from scratch with PyTorch
Ok let’s pause a minute. This first part is all about using point based approaches, and PointNet is the best example of it. If you understand PointNet, you’re halfway through understanding most point based 3D object detection and segmentation techniques.
In our case...
MODULE 2
In the second part, you'll learn how to transform a point cloud into a voxel, and how to apply 3D CNNs to learn features from them.
What you'll learn:
An Introduction to 3D Voxelization, and 2 techniques to convert a point cloud into a voxel grid
The difference between Occupancy Networks and Voxel Networks, and why most Occupancy Networks are overhyped
The one reason people choose to convert point clouds into Voxels, and the biggest drawback of voxelization networks
A « real life » insight into how we use Voxel based approaches in self-driving cars
The one mistake even LiDAR Professionals make when working with voxels (
Exactly when to use a 3D CNN, and how many layers are good enough to build a performant algorithm
A very important (but almost unknown) « trick » to do in your convolutions to avoid running convolutions on empty voxels (90% of the space is empty, but because of voxelization, a standard convolution must multiply their 3D kernels with 0 most of the time, we’ll see how to avoid it using Sparse computing)
How many voxels you should have when working with a self-driving car dataset, and how many points should they contain
An introduction to Sparse Computing, and the Step by Step implementation of Sparse Convolutions
The subtle difference between sparse and submanifold convolutions, and why both are needed in most networks
PROJECT 🔥: Voxelize an environment by building 3D Voxels on top of 3D Point Clouds
Something I want to talk about is how we won't just do something classical and boring here, but we'll really think about how experts do.
For example, we won't just look at 3D Convolutions, but we'll have an entire module on Sparse 3D Convolutions, which are used in Point Clouds, and even Submanifold 3D Convolutions. The understanding of this difference is usually not taught, but if we want to "get" 3D Deep Learning, we'll need to really dive deep into these concepts.
%206.gif)
Similarly, in the second project, you’ll build your voxels manually, which will help you develop a better understanding of how voxels work.
But there’s more:
An exclusive look into the 3D Convolutions, and the Feature maps learned from them
Occupancy Networks: How to build 3D Occupancy Grids using Sparse Voxels (the algorithm behind it is also used by Tesla’s team in their own Occupancy Networks)
The difference between 2D and 3D CNNs, and an animated view of how 3D CNNs process voxels
The implementation of the MeanVFE function, the feature encoding layer used in the State Of The Art algorithms in 3D Object Detection
How to achieve true mastery of 3D Deep Learning
How to tell if a company is using Voxels or Point based approaches in their Neural Nets
PROJECT 🔥: How to build and train a 3D CNN that loads a point cloud, converts it to a voxel, encode and extract features, before running classification
%209.gif)
This last project will help you build not only a strong understanding of voxelization, but the very algorithm you’ll build is also the backbone used by PV-RCNN, VoxelNet, and other state of the art 3D Object Detection techniques.
MODULE 3
In the final part, you'll have build solid foundations about the point and volumetric ways to build 3D Deep Learning algorithms... you'll therefore go all-in the modern techniques, and learn techniques like graph Convolutions, Point Transformers, and more...
What you'll learn:
🎙️ ADVANCED: An Interview with Point Pillars inventor (the most famous 3D Object Detector) & CEO of a Deep RADAR Startup on 3D Deep Learning
An Introduction to Graph Convolutional Neural Networks (a very expert and not-common to engineers technique) and exactly when you should use them
Dive into a guided PyTorch implementation of a Graph Convolutional Network on Point Clouds
Understand 3D Segmentation with RANDLANET, one of the most pillar algorithms in the segmentation space
What are the Point and Voxel Based algorithms everybody uses in 2025+ (and why Transformers still have a long way to go...)
How to build Auto-Encoders for 3D Segmentation (and what to consider when adapting 2D Segmentation to 3D Point Clouds)
An 2-tone research-level technique used with short-range LiDARs to increase the range of what your algorithms can process
An insider look at the algorithms used by Apple, UBER ATG, Nutonomy, and other self-driving car startups (some of them changed name, or have gone out of business, but it’s still very interesting to see why a company invented an algorithm and how they did)
Study Case: How Apple Engineers Built Face ID — An exploration of 3D Siamese Networks
Case Study: How AI Engineers process MRIs, CT Scans, and other types of medical images, using Deep Learning (I have witnessed the fusion of AI and Healthcare more than once, and every time, it’s a killer)
And many more…
When you go through it, you'll have learned very strong skills in 3D Deep Learning, whether in the self-driving car space or not!
Now here is where it gets interesting:
After I launched this course, I got fantastic reviews (this course has been the most popular — even though it's closed most of the year)...
But I also got asked several times "Can you add lessons on 3D Object Detection??? Something that would go really in-depth?? So we understand how to build the bounding boxes in 3D? Not just use networks, but actually code them..."
This felt impossible. 3D Object Detection is a HUUUGGGEEE topic... but on the other hand, it made sense to learn it after you've build the skills in Deep Point Clouds...
If you want to become THE Apex Predator on LiDAR Point Clouds, you will also need to know the advanced 3D Object Detection approaches.
This is why I spent a lot of time on the topic, and then released what is NOT a lesson, but an ENTIRE COURSE JUST ON 3D OBJECT DETECTION!
Introducting...
A bleeding-edge exploration of the world of 3D Object Detection on Point Clouds...
This DLC leverages your knowledge of 3D Deep Learning to push you to the limits and teach you how to build 3D Object Detection architectures used by the biggest self-driving car startups!
*access reserved for Deep Point Clouds Engineers
Master the The 11 Essential Blocks you need to know to build almost ANY 3D Object Detection Algorithms (hint: in Deep Point clouds, you already build 2: the point and voxel encodings)
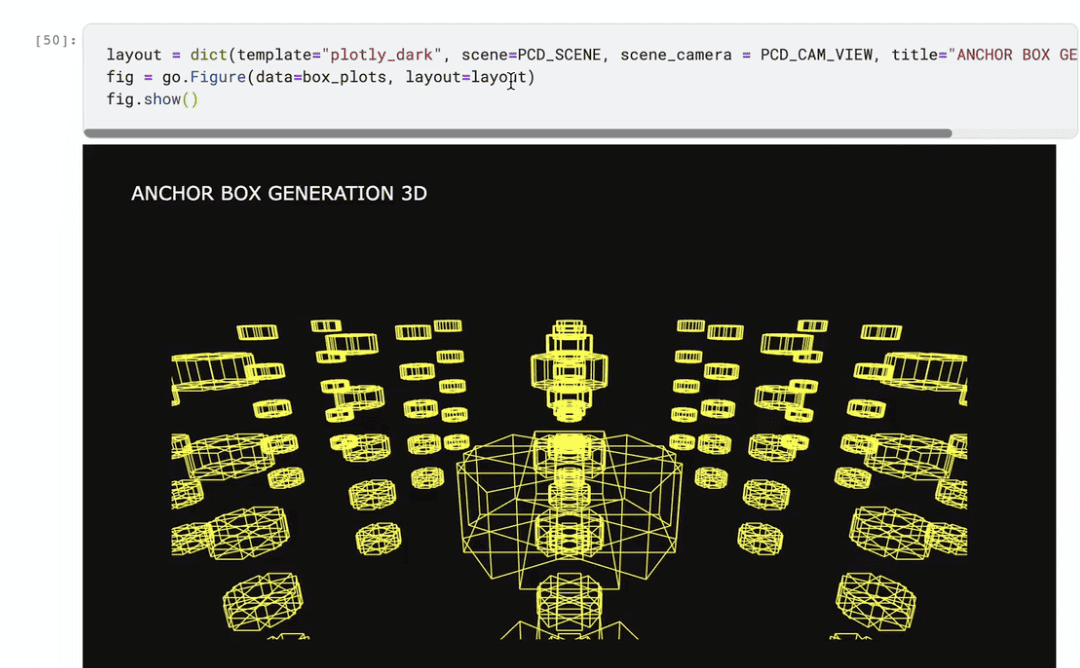
Anchor Box Generation Workshop 🔥: Design an Anchor Box Generation system to detect driving and flying vehicles
The full overview of the State-of-The-Art in 3D Object Detection, including Visual Fusion approaches (LiDAR/Camera Fusion with Deep Learning)
And:
The 3D Object Detection Workshop 🔥: Design, Assemble, and Train a Point-Voxel Based Architecture for 3D Object Detection
We built two options for you: you can either get the DEEP POINT CLOUDS course alone, or take the Advanced OBJECT DETECTION DLC with it. When purchasing both today, you get a bundle price you don't get when buying one by one.
This course is now closed and will open on February 5, 2026. Make sure to join the waitlist to get notified and receive the set of x3 LiDAR Deep Learning goodies while you wait.
APEX PREDATOR
🔺 DEEP POINT CLOUDS COURSE [495€]
🔺 3D DEEP LEARNING INTERVIEW TRAINING [195€]
🔺 MEDICAL 3D DL CASE STUDY [59€]
🔺 Cutting-Edge Update Policy [Priceless!]
🔺 PyTorch Cookbook PDF [49€]
TOTAL VALUE: 798€
↪ PRICE: 495€
*2 time payment available at no cost
DOMINION
🔺 DEEP POINT CLOUDS COURSE [495€]
🔺 3D DEEP LEARNING INTERVIEW TRAINING [195€]
🔺 MEDICAL 3D DL CASE STUDY [59€]
🔺 Cutting-Edge Update Policy [Priceless!]
🔺 PyTorch Cookbook PDF [49€]
🔺 LIDAR OBJECT DETECTION DLC [199€]
TOTAL VALUE: 997€
↪ PRICE: 575€
*2 time payment available at no cost
This course is an intermediate/advanced course, which means several prerequisites are needed, including:
Understanding of Point Clouds and LiDARs (ideally, you already opened, visualized, or even processed a point cloud file)
Coding in Python
Knowledge of Deep Learning using Computer Vision (CNNs, Object Detection, Segmentation, Convolutions)
PyTorch is a Plus, but what's really required is prior experience coding neural networks
It's actually not that demanding in terms of prerequisites, but I highly recommend you have them all before joining. If you don't have these prerequisites, I recommend you NOT to join the course.
One of Think Autonomous' biggest advantage is its conviction to the cutting-edge. When you purchase a course with Think Autonomous, you won't only get a lifetime access, but you also get frequent updates.
This course is the perfect example. It has been created in 2021, then completely rebuilt in 2023, with 50% new content, and while the price increased, the update has been made completely free to the existing clients.
This means that some people took the course years ago, and decided to follow it later, and when they opened it...
It was an entirely new and fresh course!
I can't guarantee this will always be the case, but since its released, it's been updated in 2023, 2024, and even 2025! The past has proven many times how Edgeneers from Think Autonomous get lots of benefits when purchasing early.
This course is really amazing! What makes it more awesome is that it's one of it's kind. I cannot image learning all this from random sources and aggregating it all together. You've made it so easy by putting it all in one place and then providing more resources to explore further. Thank you for all your efforts and can't wait to learn more.
"At first, I wasn't sure where to start in terms of the underlying algorithms of developing a multi-sensor perception system and wasn't sure that an online course would answer all my questions, but Jeremy really knows his stuff!
The video tutorials are well explained and the assignments or challenges are well designed in making sure that I understand every bits of the algorithms.
I'm currently applying these new knowledge to build a multi-sensor perception system for next-generation off-road, heavy vehicles Thank you for the unlimited lifetime course!"
The differences between the 3D representations are very well illustrated. Especially the Voxel part is truely great pictured.
As a busy engineer I very much appreciate the workshops that just work. I typically spend many hours playing with them to get behind the details. Thanks for this course!"
☄️
We built two options for you: you can either get the DEEP POINT CLOUDS course alone, or take the Advanced OBJECT DETECTION DLC with it. When purchasing both today, you get a bundle price you don't get when buying one by one.
This course is now closed and will open on February 5, 2026. Make sure to join the waitlist to get notified and receive the set of x3 LiDAR Deep Learning goodies while you wait.
APEX PREDATOR
🔺 DEEP POINT CLOUDS COURSE [495€]
🔺 3D DEEP LEARNING INTERVIEW TRAINING [195€]
🔺 MEDICAL 3D DL CASE STUDY [59€]
🔺 Cutting-Edge Update Policy [Priceless!]
🔺 PyTorch Cookbook PDF [49€]
TOTAL VALUE: 798€
↪ PRICE: 495€
*2 time payment available at no cost
DOMINION
🔺 DEEP POINT CLOUDS COURSE [495€]
🔺 3D DEEP LEARNING INTERVIEW TRAINING [195€]
🔺 MEDICAL 3D DL CASE STUDY [59€]
🔺 Cutting-Edge Update Policy [Priceless!]
🔺 PyTorch Cookbook PDF [49€]
🔺 LIDAR OBJECT DETECTION DLC [199€]
TOTAL VALUE: 997€
↪ PRICE: 575€
*2 time payment available at no cost